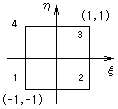
�@�P�̗v�f(��`)�ɂ����āA ����2a�A�c��2���Ƃ��� ���̍������������������A���_(�ߓ_)��
�@�ψʥ�p�x(��,��X,��Y)�ɑ��A���_�ɍ�p����O�͂��Z�o�ł��鎮�ƂȂ��Ă���B
�@�@����������
�@
�@�@[�j]{��} = {�e}12x12�@�@12x1�@�@�@�@�@12x1 �@�@�@�@�@---(A1)
�@
�@�@�����ɁA
|
�\���͊w�E���x�v�Z���H�ւ̈�� �v�Z�̐����i�L���v�f�@�j | 2013-04-28�@Mori design office |
|
�@�@�@����ѓ��ٗ�Ƃ��ė����_�l�A�~���_�l�Ɣ�r�����܂�(C��)�B �Ō�ɁA�v�Z����U������ׂ̗��_�Ǝ菇���q�ׂ܂�(D��)�B �� �v�Z�̉��(FEM) | |
| A. �v�Z�� |
|
�@�P�̗v�f(��`)�ɂ����āA ����2a�A�c��2���Ƃ��� ���̍������������������A���_(�ߓ_)�� �@�ψʥ�p�x(��,��X,��Y)�ɑ��A���_�ɍ�p����O�͂��Z�o�ł��鎮�ƂȂ��Ă���B �@�@���������� �@ �@�@[�j]{��} = {�e}12x12�@�@12x1�@�@�@�@�@12x1 �@�@�@�@�@---(A1) �@ �@�@�����ɁA |
|
|
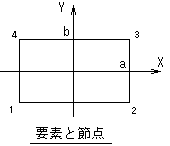
�@�@�ψʃx�N�g�� ��{��}�Ƃ��A�v�f�̒��_ 1,2,3,4 �ɂ�����A�������ψʃ�Z�� x,y�ɑ���p�x��X,��Y�̃x�N�g���ƂȂ��Ă���B
�@�@{��} = [��Z1�@��X1�@��Y1 �@��Z2�@��X2�@��Y2 �@��Z3�@��X3�@��Y3 �@��Z4�@��X4�@��Y4 ]T�@ ---(A2) �@ �@�@�O�̓x�N�g�� ��{�e}�Ƃ��A�v�f�̒��_ 1,2,3,4 �ɍ�p����Az������f�ƃ��[�����gm�̃x�N�g���ƂȂ��Ă���B �@�@{�e} = [ f1�@ mX1�@ mY1 �@ f2�@ mX2�@ mY2 �@ f3�@ mX3�@ mY3 �@ f4�@ mX4�@ mY4 ]T�@�@ ---(A3) �@�@�Ȃ��A �@�@���[�����g�̕����́A�Ⴆ�� mX �� �R�����ł�mY �ł���AY�����S��]�i�E��@��)�Ƃ���B �@�@���[�����gM�́A���_�ŗp�����Ă���A�P�ʒ���������̃��[�����g�Ƃ���B �@�@�@�@ �@mX1 =�@bMX1 �@mX2 = -bMX2 �@mX3 = -bMX3 �@mX4 =�@bMX4 �@�@�@�@ �@mY1 =�@aMY1 �@mY2 =�@aMY2 �@mY3 = -aMY3 �@mY4 = -aMY4 �@�@ ---(A4) �@ |
|
K01,01 = D(10a4+10b4+(7-2��)a2b2)/(10a3b3) K01,02 = D((1+4��)a2+10b2)/(10a2b) K01,03 = D(10a2+(1+4��)b2)/(10ab2) | [kgf/m] [kgf] [kgf] |
|
K01,04 = D(5a4-10b4-(7-2��)a2b2)/(10a3b3) K01,05 = D((1-��)a2+10b2)/(10a2b) K01,06 = D(5a2-(1+4��)b2)/(10ab2) | [kgf/m] [kgf] [kgf] |
|
K01,07 = D(-5a4-5b4+(7-2��)a2b2)/(10a3b3) K01,08 = -D((1-��)a2-5b2)/(10a2b) K01,9 = D(5a2-(1-��)b2)/(10ab2) | [kgf/m] [kgf] [kgf] |
|
K01,10 = D(-10a4+5b4-(7-2��)a2b2)/(10a3b3) K01,11 = D(-(1+4*��)a2+5b2)/(10a2b) K01,12 = D(10a2+(1-��)b2)/(10ab2) | [kgf/m] [kgf] [kgf] |
|
K02,01 = K01,02 K02,02 = D(4(1-��)a2+20b2)/(15ab) K02,03 = D�� | [kgf] [kgf�m] [kgf�m] |
|
K02,04 = -D((1-��)a2+10b2)/(10a2b) K02,05 = D(-(1-��)a2+10b2)/(15ab) K02,06 = 0 | [kgf] [kgf�m] [kgf�m] |
|
K02,07 = -D(-(1-��)a2+5b2)/(10a2b) K02,08 = D((1-��)a2+5b2)/(15ab) K02,09 = 0 | [kgf] [kgf�m] [kgf�m] |
|
K02,10 = D(-(1+4*��)a2+5b2)/(10a2b) K02,11 = D(-4*(1-��)a2+10b2)/(15ab) K02,12 = 0 | [kgf] [kgf�m] [kgf�m] |
|
K03,01 = K01,03 K03,02 = K02,03 K03,03 = D(20a2+4*(1-��)b2)/(15ab) | [kgf] [kgf�m] [kgf�m] |
|
K03,04 = D(5a2-(1+ 4��)b2)/(10ab2) K03,05 = 0 K03,06 = D(10a2-(4-4��)b2)/(15ab) | [kgf] [kgf�m] [kgf�m] |
|
K03,07 = D(-5a2+(1-��)b2)/(10ab2) K03,08 = 0 K03,09 = D(5a2+(1-��)b2)/(15ab) | [kgf] [kgf�m] [kgf�m] |
|
K03,10 = -D(10a2+(1-��)b2)/(10ab2) K03,11 = 0 K03,12 = D(10a2-(1-��)b2)/(15ab) | [kgf] [kgf�m] [kgf�m] |
|
��� ������� ��� K10,10 = D(10a4+10b4+(7-2��)a2b2)/(10a3b3) K10,11 = D((1+4��)a2+10b2)/(10a2b) K10,12 = D(-10a2-(1+4��)b2)/(10ab2) | [kgf/m] [kgf] [kgf] |
|
K11,10 = K10,11 K11,11 = D(8(1-��)a2+40b2)/(30ab) K11,12 = -D�� | [kgf] [kgf�m] [kgf�m] |
|
K12,10 = K10,12 K12,11 = K11,12 K12,12 = D(20a2+4(1-��)b2)/(15ab) �@ �Ȃ��A �̋Ȃ������@D = Eh3/(12(1-��2)) | [kgf] [kgf�m] [kgf�m] �@ �@ �@ [kgf�m] |
�@ �@ |
| B. �v�Z���@ (�v���O���~���O�ւ̗v��) |
|
�@�@���m�O�͂��ψʂ��Z�o����菇���q�ׂ�B�����ł́A�O�����[�����g�͔̊O���̂ݍ�p����Ƃ���B �@�@�@12���A�������� �@�@�@��L��(A1)��S�v�f�ɓK�p������B�A�����́A�v�f����12�{�̐��ƂȂ�B �@�@�A�g������(�S�̍����s��) �@�@�@���ʐߓ_�͉̂��Z�������āA�ߓ_�����ɑ��鎮��B �@�@�@�Ⴆ�A�̋抄�萔����ia�A�cib �̏ꍇ �@�@�@�@�v�f����Nelt=ia�ib�A�ߓ_����Nnod =(ia+1)�(ib+1) �@�@�@�@�S�v�f �Ɏ�(A1)��K��������ƁA�A������Nelt x 3 �ł���A �@�@�@�@���ʐߓ_�͉̂��Z�����ŁA�A������ Nnod��3�ƂȂ�B �@�@�@�E�O���̃��[�����g �@�@�@�@�̕�a�S��My�A��b�S��Mx����p����ꍇ�A �@�@�@�@�v�f���Ɍv�Z�A��(A4)���v�Z����B �@�@�@�@�ߓ_�ɍ�p���郂�[�����g���A2�̗v�f�ɂ܂���������́A�e�X�v�f�ɑ�1/2�ÂÂɂ��� �B �@�@�@�@���̒l���O��{�e}�ɑ������B �@�@�B�ψʂ̊��m���� �@�@�@�ψʂɊւ��A���Ɋ��m�ł���ꍇ�A�A�������珜�O����B �@�@�@�E��F���E�����͎x�����@�ł���A���L�̊��m�ߓ_�����ƂȂ�B �@�@�@�@�E�S���P���x���ł́A�ψ�z=0�̊��m�ł���A���m�ߓ_�� No = 2(ia+ib)���������O���� �@�@�@�@�@�A�������� Nnod��3 - 2(ia+ib) �@�@�@�@�E�S���Œ�x���ł́A��x=0,��y=0�̊��m�������́A No = 2(ia+ib)�3 �̎������O���� �@�@�@�@�@�A������ Nnod��3 - 2(ia+ib)��3�@�̂��������ƂɂȂ�B �@�@�@�E�����ψʃ�z�̏ꍇ �@�@�@�@�@�ψʃ�z�ɑ����̗� {Fz} = [�j]{��} �Z�o����B �@�@�@�@�@�O�͂e�Ƒ��E���āA{Fo} = {�e} - {Fz}�@���Z�o����B �@�@�@�@�@�S������ [�j]{��} = {Fo}�@�ł���A��q�Ɠ��l�Ɋ��m�ߓ_�����O���āA�A�����𗧂Ă�B �@�@�@�E���̊��m�ߓ_���O�̃v���O���~���O�́A �@�@�@�@�@�Ⴆ�A���m�ߓ_��1,2,3,����KOZ�̏ꍇ�A���m�ߓ_�z���know[0,1,2,3,��]�Ƃ���ƁA �@�@�@�@�@for(i=1;i<=Nnod3;i++){index[i]=1;} �̃p�����[�^�� for(i=1;i<=KOZ;i++){index[know[i]]=0;} �@�@�@�@�@m = 0; for(i=1;i<= Nnod3;i++){ if (index[i]>0){ m = m + 1; index[m] = i;} } �@�@�@�@�@for(i=1;i<= m;i++){ F[i] = F[index[i]]; �@�@�@�@�@�@�@for(j=1;j<= m;j++){K[(i-1)*index[i]+ j] = K[(index[i]-1)*Nnod3+ index[j]];} �@�@�@�@�@} �@�@�@�E����ɂāA���߂�ׂ��� [�j]{��} = {�e}�� �j,�e������ꂽ���ƂɂȂ�B �@�@�C�A�����̉�@ �@�@�@�E����ꂽ [�j]�͐����s��mxm�ŁA�t�s�� [�j]-1 �ŕψʃւ����߂���B �@�@�@�E�v���O���~���O�Ƃ��ẮA�K�E�X�W�����_���@��R���X�L�[�@�Ȃǂ�����B �@�@�@�E���̕��@�́A�������ʂ��O��F[i]�̏ꏊ�ɕψʂ̒l���o��B�����AF[i]���ψʂ̒l �ɒu�������B �@�@�D�ψ�{��}�̎Z�o �@�@�@�E�C�œ���ꂽ�l�ɑ��A�B�̊��m�����̋t�������s�� �@�@�@�@for(i=1;i<=Nnod3;i++){��[i] = 0;} �@�@�@�@for(i=1;i<=mm;i++){��[index[i]] = F[i];} �@�@�@�@for(i=1;i<=Nnod3;i++){ ��[i] = ��[i] + �����ψʃ�[i]; } �@�@�E���͂̎Z�o �@�@�@�E�ψʂ̒l���Z�o�ł����̂ŁA�e�v�f���Ƃɍ���������(A1)�ɑ�����ē���F�y�у��[�����gM���Z�o�ł���B �@�@�@�E�Z�o�������͂́A�e�X�ߓ_�Ɋւ��P�����Z���āA�ߓ_�̓��͒l���Z�o����B �@�@�@�E���[�����g�́A��(A4)���Q�Ƃ��Đ����������܂߂āA�P�����ς�Mx,My���Z�o �@�@�@�@(�Ⴆ�Γ���ߓ_���Q����A���̍��v�l���Q�Ŋ���P������)����B �@�@�@�E���� ��x= 6Mx/h2�@��y= 6My/h2 |
| C.�v�Z���� (���x����) |
|
�@�@��ʉd�ł̎����� �@�@���L(a)�`(d)�́A���������ǂ��A�v�f��1600�ŕ֗��l�ɋ߂��B
�@�@�|�A�\������
�@�@���͂藝�_�F����a=30cm�A��b=1cm�A�f��2�����[�����g I = b�T3/12 = 2.25cm4 �@�@�@�@�@�@�@�@�f�ʌW�� Z = b�T2/6 = 1.5cm3 �@�@�@�@�@�@�@�@��=F�Ea2/(2EI)�A��=F�Ea2/(3EI)�A��=-F�Ea/Z �@ �@�@���[�����g
�@�@����̃��[�����g�̏ꍇ�́A��(1cm)�̕����𑽂�(100)�̕������x�������B �@ �@�@�Q�l
�@�@�@��������傫������قǁA�~�����̃��[�����g�l�ɗ��ꂪ�傫���Ȃ�B �@ �@�@(g)�T�^�I�����ɏ����lj��ɂ��v���O�����`�F�b�N�i���l����уO���t�����j �@�@�@ �S���P���x���̏����� �@�@�@�@�E���E�ӂɂ����āA��y=0 �y�с@Mx=�S���Œ�ł̒l �@�@�@�@�E�㉺�ӂɂ����āA��x=0 �y�с@My=�S���Œ�ł̒l �@�@�@�@���ʒl�́A�S���Œ�̏����Ɠ���ƂȂ�B �@ �@�@�@ �d��̏����� �@�@�@�@�E�ψʃ��W���d���L��ł̕ψ� �@�@�@�@�@�i�W���d�̓_�� �ψʍS���_�Ƃ���) �@�@�@�@���ʒl�́A�W���d�����m�� �d���ʒu���ψʖ��m�̏ꍇ �Ɠ���ƂȂ�B �@�@�@�Ȃǂ��l������B | 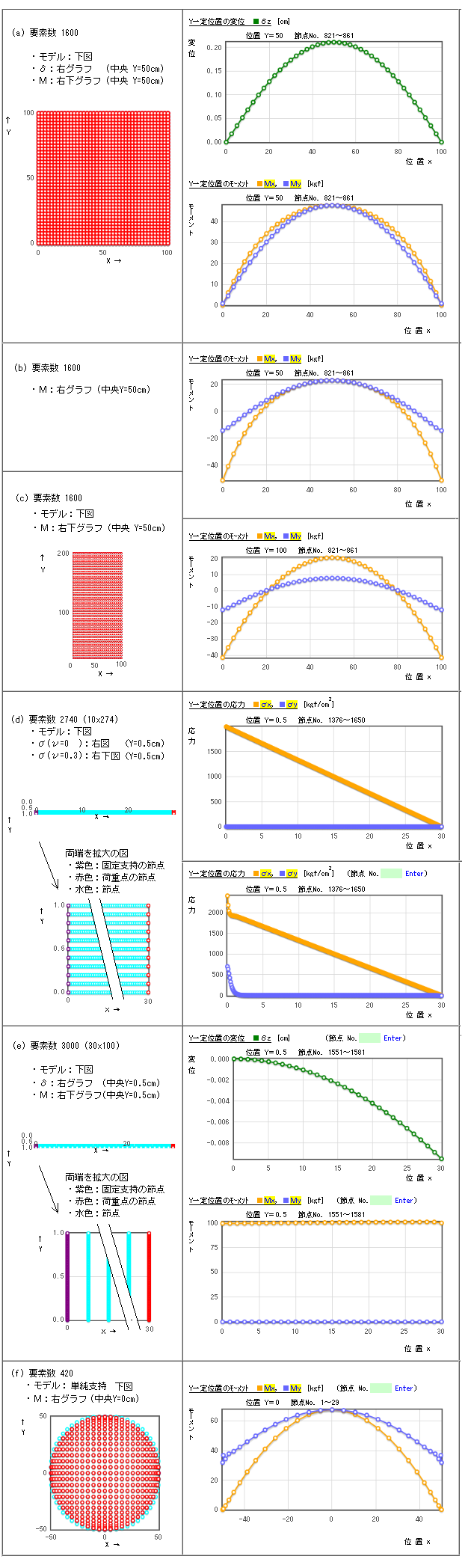
�@�g�p���������萔�l �@�@�|�A�\���� ��= 0.3 �@�@�����O���@ E= 2100000 [kgf/cm2] | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| D.���_ (���̗U��) |
|
�ߎ������� �l�p�`�v�f�ɂ����āA�萔����1�`��12��p���āA�C�ӂ̂���݂��ߎ�������
�@
�c�́A��L�̓��}����p���Ď��̂悤�ɂȂ�B
---(10) �@ �@
�@ ---(12)
�@�@�@�@�@�@12(1-�� )2 �@ �@ �v�f�����s��̗U���v�Z
�E�̊֘A�����F�v�Z����(����) �@FEM�̊֘A�FFEM�v��(�l�p�`)�A FEM����(�O�p�`) �@Copyright(C) Mori Design office �@All rights Reserved. �@ |